
A key and controlling Innovation in Surgical Robotics
In 1997, just one year after Intuitive Surgical was founded, Chris Julian was tasked with transforming an early, heavily machined prototype assembly into a scalable, manufacturable, and elegant clinical product.
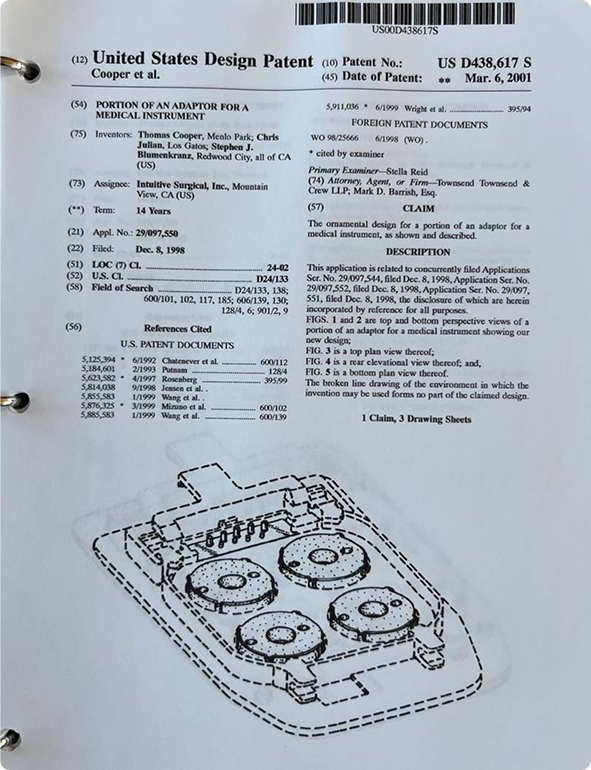
The challenge was far more significant than designing a component. The sterile adapter represented one of the most critical interfaces in robotic surgery—the boundary between the sterile patient environment and the non-sterile robotic system. It had to reliably transmit motion, maintain sterility, support instrument functionality, and integrate seamlessly into the surgical workflow.
Chris led the development of a breakthrough sterile adapter architecture that incorporated:
- Extremely low part count for simplicity, reliability, and manufacturability.
- Near friction-free mechanical coupling between the robotic arm, sterile adapter, and instrument.
- An elegant diaphragm-based interface enabling precise mechanical transmission while preserving the sterile barrier.
- Integrated electrical communication pathways for instrument recognition and system intelligence.
- A disposable architecture capable of supporting future generations of drapes, instruments, and robotic platforms.
The resulting design became a cornerstone technology within the da Vinci platform. Future generations evolved through molding, integrated drape attachments, disposable configurations, and expanded functionality, yet many of the core concepts established during the original development remain visible in today’s systems.
The sterile adapter also became strategically important to the industry. Creating a reliable sterile interface between robotic hardware and patient-contacting instruments is one of the most difficult challenges in surgical robotics. The architecture developed during this program contributed to a substantial patent portfolio and became a significant barrier to competitive entry. Several patents associated with the technology have been widely cited throughout the robotic surgery field.
Perhaps most importantly, the project demonstrated a design philosophy that would define Chris’s career: simplifying complex technical problems into elegant, scalable solutions that can survive decades of product evolution.
Few create architectures that remain relevant across multiple generations of a platform and help define an entire industry.

Ridge Medical Innovation, LLC
Chris Julian
Experience spanning surgical robotics, implantable devices, manufacturing systems, and advanced medical technologies.


Legal Notice: Intellectual Property & Confidentiality: Every reasonable effort has been made to ensure that the content of this website complies with applicable confidentiality obligations and intellectual property rights.Technical descriptions emphasize engineering methodology, innovation strategy, publicly available information, personal experience, and information I am authorized to disclose, rather than proprietary implementationdetails or trade secrets. Images are properly licensed, AI-generated, or artistic recreations used solely for illustrative purposes. No confidential or trade secret information is intentionally included. All Case Studies arebased on publicly available information and personal professional experience. Confidential, proprietary, and trade secret information has been intentionally omitted.