
Man to machine doesn’t always translate
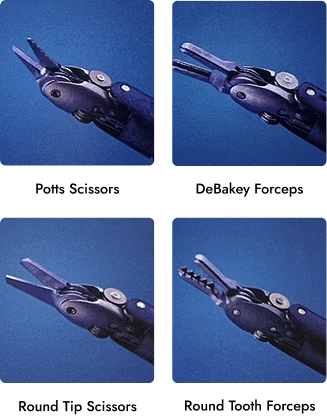
One of the earliest instrument programs Chris Julian led at Intuitive Surgical involved the development of several core robotic instruments, including Potts scissors used in coronary artery bypass graft (CABG) procedures and round-tip scissors used across multiple surgical specialties.
While scissors appear deceptively simple, creating a robotic scissor that cuts reliably at miniature scale presents a surprisingly difficult engineering challenge.
Traditional surgical scissors rely on a surgeon’s hand to bias the blades together during cutting. The blades are intentionally manufactured with subtle geometry that creates intimate contact as they sweep from the proximal end of the blade to the distal tip. That contact patch is what produces the shearing action required for clean cuts.
In robotic surgery, that human bias disappears.
The robotic mechanism drives the blades, but it does not naturally compensate for manufacturing tolerances, blade variation, wear, or assembly stack-up. At the same time, robotic instruments are significantly smaller than traditional hand-held instruments, making it difficult to rely on blade flexibility to maintain cutting performance.
Chris recognized that the problem was not the cutting edge itself—it was maintaining consistent blade engagement throughout the cutting stroke.
His solution was elegantly simple.
By incorporating a Belleville spring washer into the pivot axis joining the two scissor blades, he created a controlled preload that continuously biased the blades together. The design automatically compensated for tolerance variation while maintaining the intimate blade contact required for reliable cutting performance.
The result was a robotic scissor capable of delivering smooth, predictable cutting behavior without relying on operator-applied force.
The instruments became foundational tools within the da Vinci system and were widely praised for their performance, precision, and reliability.
Surgeons judged instrument quality by their ability to cleanly cut challenging materials while maintaining delicate tissue handling, and these designs quickly established themselves as benchmark instruments within the platform.
More importantly, the project demonstrated a recurring theme throughout Chris’s career: identifying the true source of a problem, then solving it with an elegant mechanical solution that improves performance, manufacturability, reliability, and user experience simultaneously.
A single Belleville washer solved what many considered a fundamental limitation of robotic scissors.
Ridge Medical Innovation, LLC
Chris Julian
Experience spanning surgical robotics, implantable devices, manufacturing systems, and advanced medical technologies.


Legal Notice: Intellectual Property & Confidentiality: Every reasonable effort has been made to ensure that the content of this website complies with applicable confidentiality obligations and intellectual property rights.Technical descriptions emphasize engineering methodology, innovation strategy, publicly available information, personal experience, and information I am authorized to disclose, rather than proprietary implementationdetails or trade secrets. Images are properly licensed, AI-generated, or artistic recreations used solely for illustrative purposes. No confidential or trade secret information is intentionally included. All Case Studies arebased on publicly available information and personal professional experience. Confidential, proprietary, and trade secret information has been intentionally omitted.