
NeoGuide Systems: Early Leadership in Flexible Robotics and Endoluminal Navigation
Following his early work in robotic surgery, Chris Julian became deeply involved with NeoGuide Systems, a pioneering medical robotics company pursuing one of the industry’s most ambitious goals: reinventing colonoscopy.
The vision was straightforward but transformative
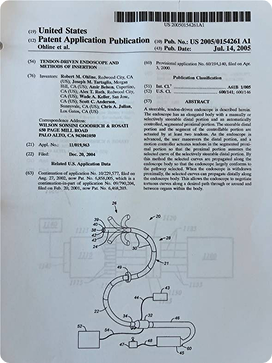
Traditional colonoscopy procedures relied heavily on physician skill and experience to navigate the highly variable anatomy of the colon. NeoGuide sought to create a robotic colonoscope capable of repeatable, predictable navigation, improving procedural consistency while potentially increasing physician efficiency and patient throughput.
The technical challenge was enormous.
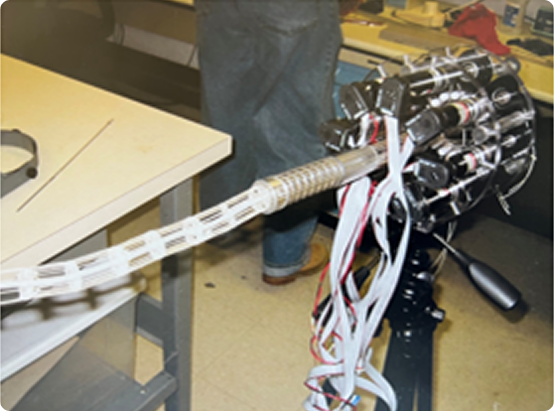
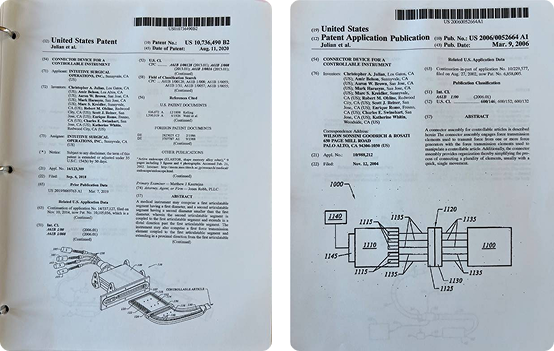
Unlike traditional robotic systems built around rigid shafts and articulated joints, NeoGuide’s architecture relied on a highly flexible robotic body containing multiple tendon-driven actuation pathways.
The system incorporated sixteen articulated sections, each controlled through multiple tendon-driven actuation pathways.
The result was a robotic system containing sixty-four independently managed control cables operating within an extremely constrained mechanical environment
Over many years as a key consultant, Chris played a significant role in solving many of the fundamental engineering challenges required to make the architecture viable.
His contributions included:
- Development of articulated backbone and spinal link architectures
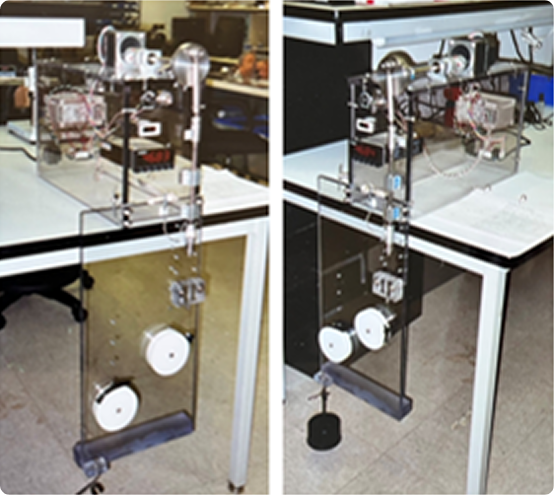
- Design of cable-driven actuation systems and motor-drive mechanisms
- Sterile-to-capital equipment interface architectures
- Cable durability and fatigue characterization
- Coil-pipe routing optimization and friction reduction strategies
- Length-compensation and slack management systems
- Cable termination methods and assembly techniques
- Evaluation and implementation of advanced polymer cable technologies
- Reliability engineering for highly articulated robotic systems
Perhaps most importantly, NeoGuide provided a deep education in continuum robotics.
Unlike rigid robotic systems, where motion can be controlled through relatively straightforward kinematics, continuum robotic systems behave more like living structures, constantly changing shape under varying load conditions.
Understanding these interactions became a defining element of Chris’s expertise in flexible robotics.
Although NeoGuide ultimately did not achieve commercial success as an independent company, the technical knowledge generated through the program became highly influential throughout the field of robotic endoluminal navigation.
For Chris, NeoGuide represented more than a consulting project.
It was an opportunity to master an entirely different branch of robotics—one that continues to influence many of today’s robotic catheter, flexible endoscope, and minimally invasive navigation platforms.
More than two decades later, the lessons learned through NeoGuide continue to shape the development of flexible robotic systems around the world.
Ridge Medical Innovation, LLC
Chris Julian
Experience spanning surgical robotics, implantable devices, manufacturing systems, and advanced medical technologies.


Legal Notice: Intellectual Property & Confidentiality: Every reasonable effort has been made to ensure that the content of this website complies with applicable confidentiality obligations and intellectual property rights.Technical descriptions emphasize engineering methodology, innovation strategy, publicly available information, personal experience, and information I am authorized to disclose, rather than proprietary implementationdetails or trade secrets. Images are properly licensed, AI-generated, or artistic recreations used solely for illustrative purposes. No confidential or trade secret information is intentionally included. All Case Studies arebased on publicly available information and personal professional experience. Confidential, proprietary, and trade secret information has been intentionally omitted.